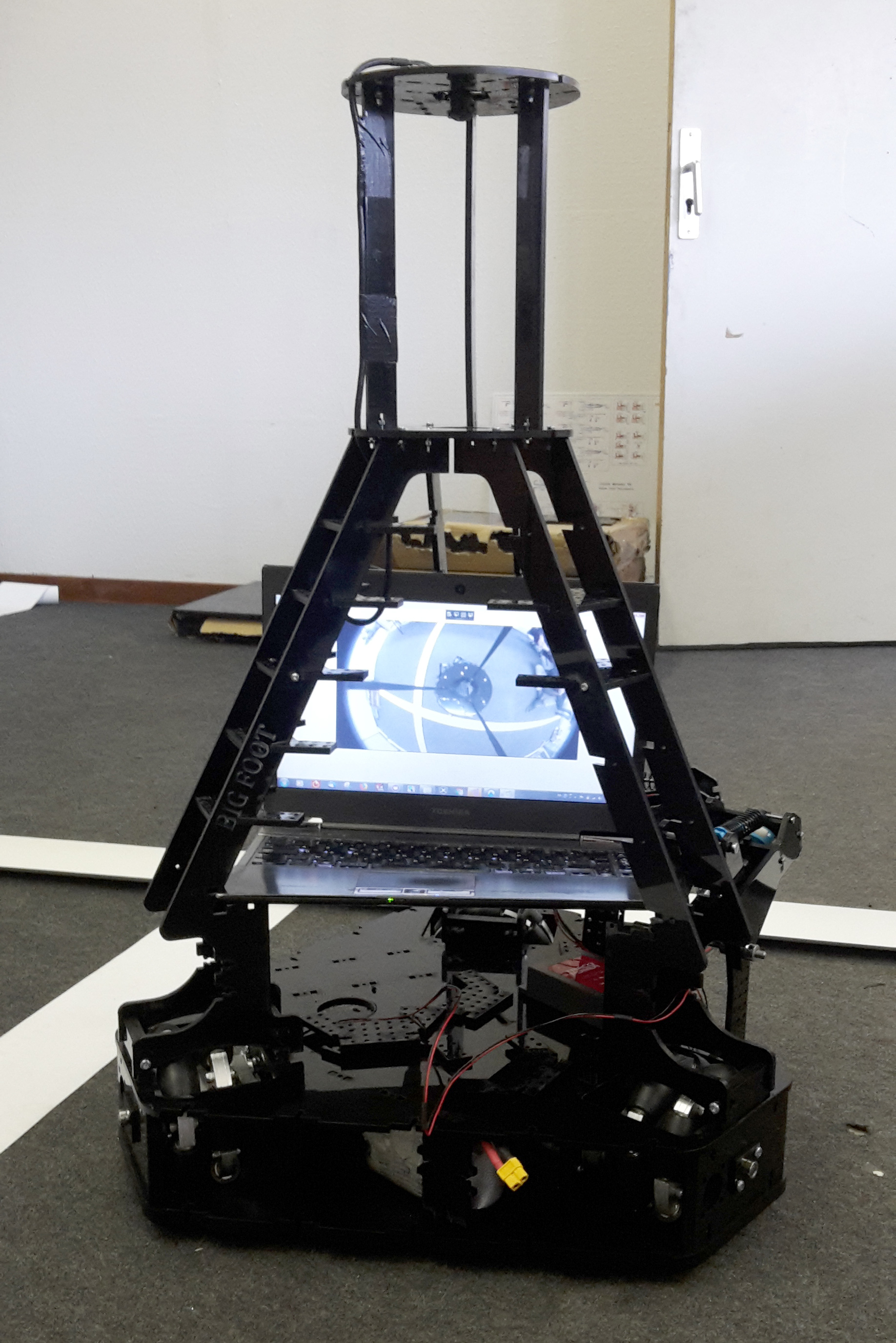
By the end of 2018, mechanical structure of our first robot for the robocup has been completed. There is still a lot of work to do, but we are able to move, to grab videos from our embedded camera and to positionning algorithms are ok ! This is not so bad after 4 months.