
Qualification material for the ROBOCUP 2019 :
A list of, at most, 5 scientic papers published during the last 5 years of the team which are related to RoboCup. A complete reference must be provided for each paper, including Title, authors, affiliation, Conference or Magazine name, editor (when applied), year of publication and pages of the procedures or magazine were it was published. Abstracts of these papers must also be submitted : No scientific paper – new team
Team Description Paper/Innovations of the team : File Download
A list of results and awards obtained by the team in the last 3 years : no past results – new team
A video showing the capabilities of the team’s robots : not ready yet
A list of contributions of the team to the RoboCup MSL community :
- RoboCup 2019 – RCT – Positionning by linear Kalman filter
- RoboCup 2019 – RCT – Impact of the initial position of a plunger in a coil gun
Declaration if the team will be part of a mixed team : No
Declaration if the team requires 802.11b access-point : Yes
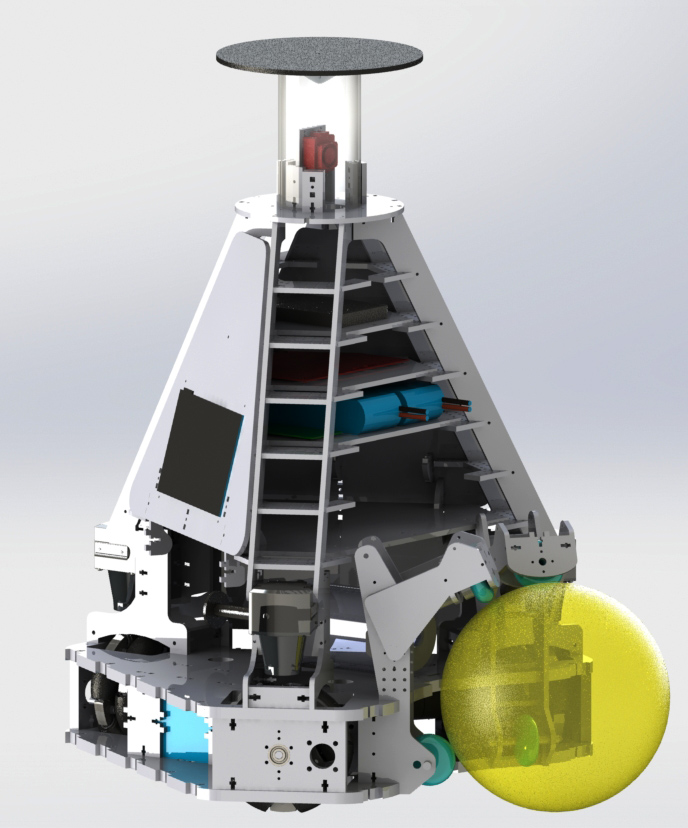
A mechanical and electrical description of their robots (e.g. by providing drawings) as well as a flow chart of the software structure :
List of MAC Addresses used by the team, with explicit indication of those that will be used for wireless communication and their type: robots or development computers. All other MAC addresses will be blocked :
-
- Robot 1 : 5c:5f:67:ba:3d:94
- Robot 2 : 5c:5f:67:ba:51:6c
- Student computer : 88:78:73:d0:8a:f9
- Other MAC addresses not ready yet (embedded PC using Wifi have not all been received)
Team leader : Valentin GIES (Toulon University)
Logo : Download RCT Logo
{kind=link}
Profile : Robot Club Toulon Middle-size league (MSL) team is a new team aiming at participating in the RoboCup 2019. Our goal is for a first year to have a team able to qualify for the RoboCup competition. This iis a real challenge considering we have to build a whole robot team from scratch. As we have made an extensive use of other teams experience for the conception of our robots, we also aim at sharing some new bricks with the MSL community such as a simulator for optimizing the kicking systems, a linear Kalman filter for positioning, or using a smart camera for image processing.
Research topic : Electronics – Ball control and kicking system – IA – Multi agent cooperation – Embedded Vision
Video of our robots in January 2019 during a public open house at Toulon University
Video of the kicking system test at Toulon University – 6th Feb. 2019